1104 機器作成上の注意
3次元Data作成要領
概要
本章は、対話入力操作以前の機器(構造物)の3次元Dataの利用に際し、User様にて作成する機器、構造物の3次元Dataの作成要領、注意事項を記したものです。
EYECADで作成する3次元Data(機器、構造物)の基本的な作成要領(操作要領ではありません)概念を説明します。
個別の具体的な操作要領については本マニュアル該当ページを参照して下さい。
概略手順
- プラント座標系の設定
- 機器、構造物の形状定義(寸法含む)
- 機器、構造物の回転、傾きの定義
- 機器、構造物のオリジン定義(配置定義)
手順2~4を機器(構造物)の数(付属品があればその数も含む)だけ繰り返します。
注)構造物は、基礎等の単品物以外は構造物モデル入力で定義するので、ここで説明することは、対話操作上は表に出てきません。
Dataタイプ
-
3次元Dataは取扱い上、以下の4タイプに区分しています。
No. 3次元Data区分 対象物 1 機器 機器、機器付属品 2 構造物 建築、土木構造物(3D構造物で機器以外) 3 フロア 床面、操作デッキ、手摺、階段… 4 配管 配管、弁、計装品 - ここでは機器、構造物のみを対象とします。
-
個々の形状Dataは以下の構成要素(シンボル)の組合せで定義します。
No. 3次元Data 親 付属品 1 機器 1ヶ 付属品標準シンボルを除く標準シンボル及び基本エレメント 最大50ヶ 全標準シンボル及び基本エレメント 2 構造物 -- (構造物は親のみで、付属品は持ちません。)
シンボル
3次元表示で使用することの出来るシンボル構成とその組合せ例を次に示します。
| 3次元シンボル構成 | 組合せ使用例 | ||
|---|---|---|---|
|
機器標準シンボル 機器付属品標準シンボル 構造物標準シンボル 基本エレメント |
機器 | 機器標準シンボル | |
| 機器標準シンボル | 機器付属品標準シンボル | ||
| 機器標準シンボル | 基本エレメント | ||
| 機器付属品標準シンボル | 基本エレメント | ||
| 基本エレメント | |||
| 構造物 | 構造物標準シンボル | ||
| 構造物標準シンボル | 基本エレメント | ||
注)シンボル個別詳細は『3D標準機器シンボル形状』を参照して下さい。
注2)組合せ使用例は例えば、機器は[機器標準シンボル+機器付属品標準シンボル][機器標準シンボル単独][基本エレメント+機器付属品標準シンボル]等で表現出来ることを示しています。
注3)各シンボルは円柱、直方体、円錐等の基本エレメント(要素)から構成されています。
座標系
3次元コーディング上考慮する必要のある座標系(空間)はシンボル定義座標系、機器(構造物)定義座標系、プラント座標系の3座標系ですが、Data定義レベルでは機器定義座標系以降を対象とします。
シンボル定義座標系(単位mm)
- 『3D標準機器シンボル』に示すように、各標準シンボル毎に定められた座標系で、標準シンボルが親シンボルとして選ばれたときには、機器(構造物)定義座標系と一致します。
- 各標準シンボルは基本エレメントより構成されます。
- ユーザ様は特に意識する必要はありません。
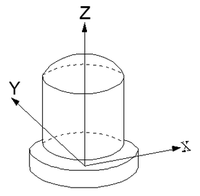
機器(構造物)定義座標系(単位mm)
- 機器、構造物の1ユニットを定義する座標系で親シンボルとして選ばれた標準シンボル(または基本エレメント)の座標系に一致します。
- 付属品はこの座標系上で位置、回転を定義します。
プラント座標系(単位mm)
実際のプラント空間上に定義された座標系でこの座標系上で、機器、構造物の位置、回転、傾きを定義します。
Data作成要領
準備作業
プラント座標系の設定
座標軸の設定
- 対象とするプラントに
 の座標軸を設定します。
の座標軸を設定します。 - 座標軸はY軸+方向を北(コンストラクションノース、プラントノース)とし、Z軸+方向を天とするのを原則とします。
- ファイル-プロパティ メニューよりDialogを開き設定します。詳細は、「10-02 全体構成」の「プロパティ」を参照してください。
座標原点
- 座標原点(X, Y, Z) = (0.0, 0.0, 0.0)となる基準点を定めます。
- 座標値はマイナスも使用できます。
Data作成
手順
-
Dataの作成手順概念フローを以下に示します。
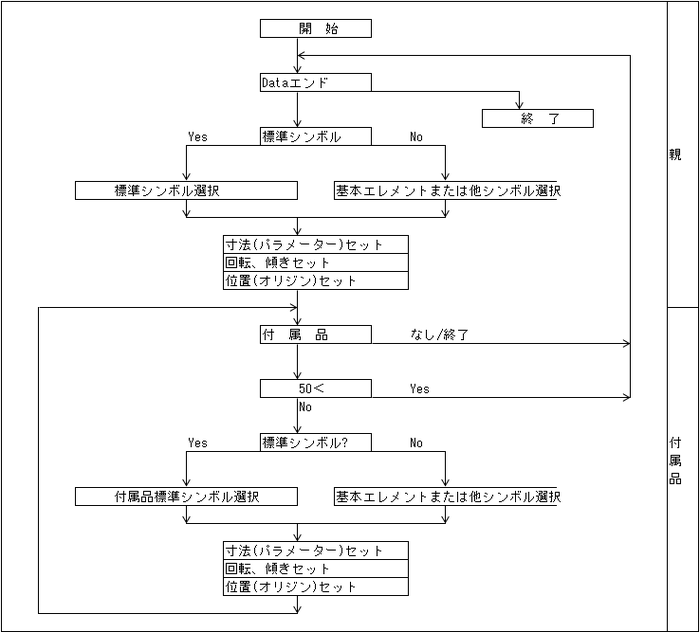
注)対話入力では、通常付属品はノズル、レッグ、ラグ等タイプ別のData定義ができるようになっており、本内容は寸法、位置等でData定義する場合に該当します。
また対話入力では付属品の最大数は50個です。
シンボル選択
- 『シンボルリスト』より最適のシンボルを選択します。
- 標準シンボルにない場合は基本エレメントより選択します。
寸法(パラメータ)(実数値:mm)
- 『シンボルリスト』に示すように、個々のシンボル毎にパラメータが最大5個の範囲で設定されています。
-
各パラメータは機器形状Dataと対応しています。
(例 円筒曹 P1:胴径、P2:胴高さ)
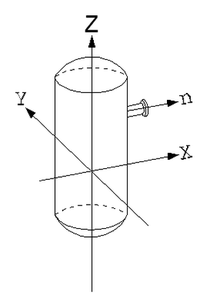
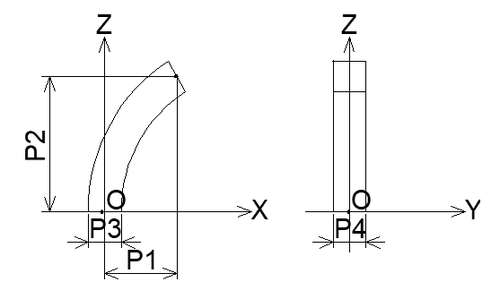
Z軸周り回転角(実数値:度)
- (親)シンボルをプラント空間上に表示する場合に、Z軸周りに回転させる角度を度単位で記入します。
-
機器定義座標系のX,Y座標軸とプラント座標系のX,Y軸の方向が一致するときをZ-ROT=0.0度とします。
下図の例では、Z-ROT=30.0゜ となります。
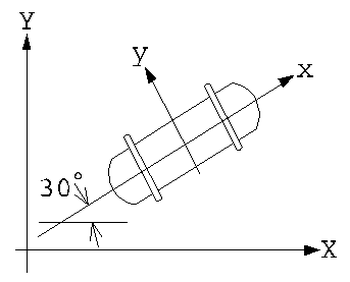
- 角度は半時計方向を正とします。
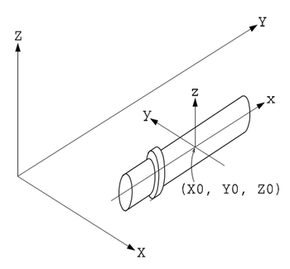
傾き(X-ROT,Y-ROT)(実数値度)
-
機器、構造物をプラント空間に配置するときの傾き角度をX, Y座標軸に対する回転角度で表わします。
下図の例では、Y-ROT=15.0° となります。
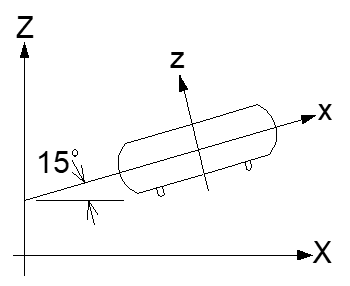
- 特殊な場合を除き、傾いて設置されることは少ないのでX-ROT=0.0°,Y-ROT=0.0°です。
位置(オリジン座標)(実数値:mm)
親
-
シンボルに対し、右図のように複数のオリジンが設定されている場合、mroutプロパティの「オフセット」からオリジンが選択できます。
寸法を抑えたい位置をオリジンに変更できます。
(この例では機器芯、上部T,L、下部T,Lの3オリジンからの選択となります。)
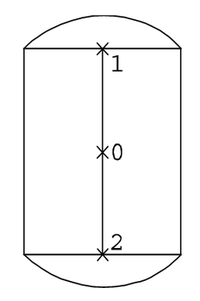
- 選択したオリジンのプラント座標系での位置をX,Y,Zの座標値を記入します。
- 対話入力時は、この他にフリーオリジンという概念が入っています。
付属品
- 機器定義座標系でのシンボルまたはエレメントのオリジン(シンボルまたはエレメントの原点)のX,Y,Zの座標値を記入します。
- 親シンボルのオリジンNo.が、0以外(オフセット有)の時は、そのNo.に対応したオフセットしたオリジンからの位置とします。
Data作成上の注意事項
Data作成時、以下の制約条件に注意してください。
-
パラメータ値は原則として0<P<32,767(mm)の範囲で入力して下さい。
シンボルによってはマイナスも許されます。
多面体エレメントを用いたシンボルの偏心量等で0に設定したい場合は、0.1と入力して下さい。
(パラメータ数は1~5の範囲でシンボル毎に異なります)
- シンボルどうしの干渉は原則としてできません。
-
シンボルの形状および表現についての制約
-
『3D標準機器シンボル』にない形状は定義できません。
ただし、各シンボルを組合せて表現することは可能です。
その他自由曲面による立体も定義できません。
ただし、平面Dataの組合せにより、サーフェースモデル的に近似表現することは可能です。
-
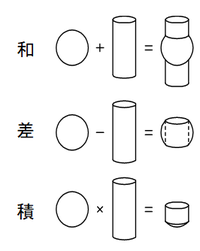
エレメント同志のブーリアン演算(図形同志の論理和、論理差、論理積の集合演算)は不可です。
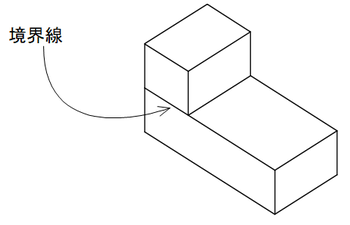
したがって各シンボルを1つの積み木とみなして、その組合せで機器、構造物の立体形状を表現します。
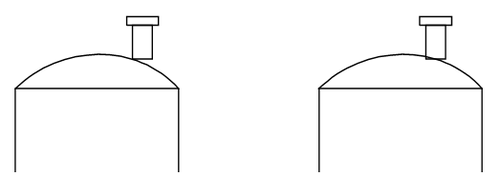
下図の様に直方体の合成を行った場合、境界線は残ってしまいます。
外周線の無いフロアを張り付けて消すような工夫が必要です。
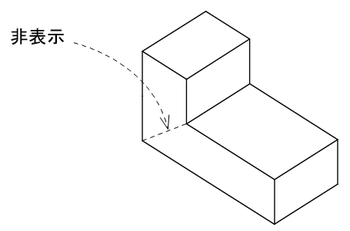
多面体エレメントは境界線の表示ON/OFFが設定可能なため多面体エレメントを組合せると下図の様に表現できます。
-
円錐台(偏心円錐台含む)のパラメータについて
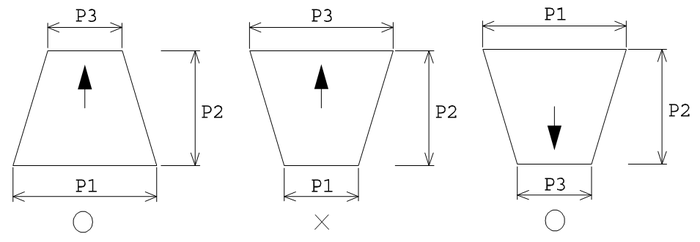
円錐台は左端図の様にP3<P1で定義しなければなりません。
中央の表現はエラーとなります。
中央の形状を表現する場合、右端図の様にシンボル全体を回転させて表現します。
-
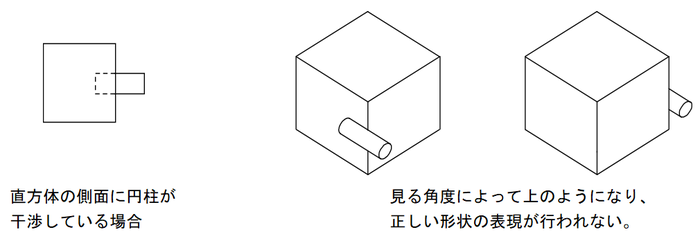
シンボル同志で干渉があった場合
モデルの特性上、立体シンボルが干渉した状態で3次元形状を定義することは正常ではありません。
もし、シンボル同志が干渉している場合はその部分についての隠線処理が見る方向によって正常に行われなかったり、干渉による境界線が発生しない為、表現上不都合な点が生じる場合があります。(下図参照)
ただし、同一グループ内(シンボルの組合せ。例えば機器本体と機器付属品の関係)では、既存シンボルで表現しきれない部分を補う為に意識的に干渉させる場合もあります。
また立体シンボルとフロアDataの干渉は、次の場合のみ許されます。
-
水平な平面エレメントに垂直に直方体、または円筒エレメントが交わる場合。
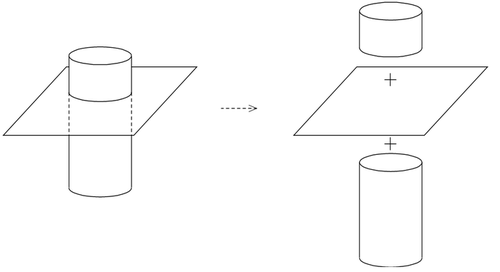
上記の様に立体シンボルのエレメントが自動分解されて正常に隠線処理されます。
-
上記以外のケースは取扱いできません。
干渉が生じた場合、表示異常となります。
-
パラメータ最大値を超えるモデル作成
パラメータ最大値(32737mm)を超えるモデル作成
パラメータ最大値を超えるモデルはエレメントを組合せて作成して下さい。
例) 100m高の煙突の場合
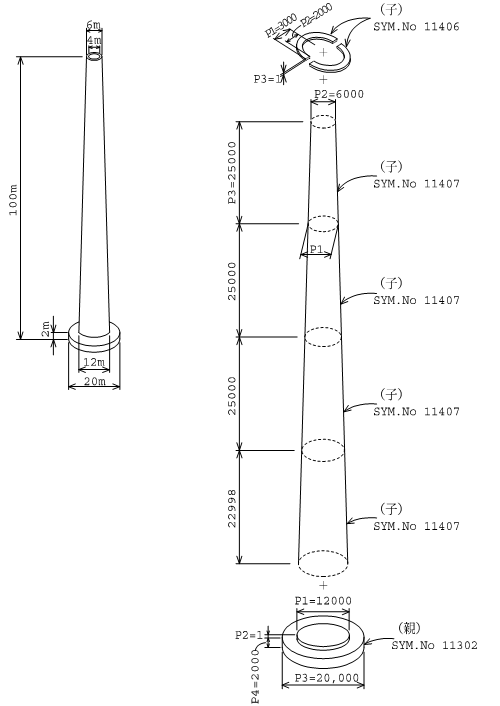
注意事項
- SYM.No 11406,11407 は合わせ目が出ない多面体シンボルです。
- 煙突を途中でクリッピングしても、円環は描画されません。
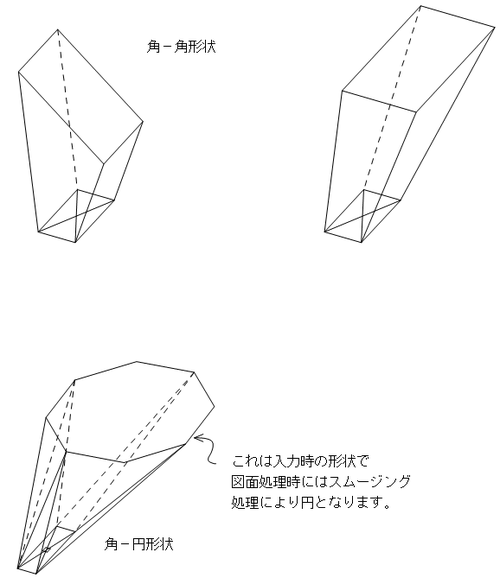
接続多面体の入力方法
接続多面体は、従来の5パラメータのシンボルでは表現できなかった複雑な形状(主に角ダクトやホッパー)を表わすための組合せシンボルです。
特徴
- 底面用シンボルと上面用シンボルの、2個のシンボルで1つの形状を生成します。
- 使用可能な組は以下の通りです。(カッコ内はA(B)GSM3D内のシンボルNo.)
- パラメータの意味は、マニュアル「共通 データベース管理」『シンボルコーティングフォームシート』を参照して下さい。
| No. | 底面 | 上面 | シンボルNo.の対 | 使用上のルール | |||
|---|---|---|---|---|---|---|---|
| 1 | 角 | 角形状 | 10070 | 10071 | 機器の付属品入力画面にて必ずこの順番を守って、接続多面体シンボル組を入力して下さい。 | ||
| 2 | 円 | 円形状 | 10073 | 10074 | |||
| 3 | 角 | 円形状 | 10070 | 10072 | |||
| 4 | 円 | 角形状 | 10073 | 10075 | |||
使用上の注意
本シンボルは、正しく配置しないと隠線処理や干渉チェック計算が正しく実行されませんので、ご注意下さい。
なお、ダクト入力では、この接続多面体の配置を自動発生しています。
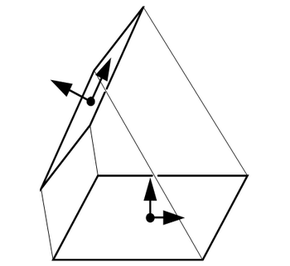
作図例
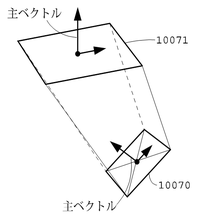
芯ズレのある方体
| 斜視図 | 平面図 | 説明 |
|---|---|---|
 |
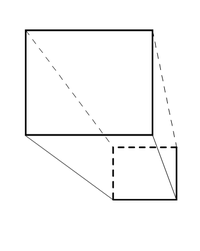 |
10070と10071の主ベクトルは、まず同方向に向けて下さい。 その後に方向を変えることは可能です。 ただし主ベクトルのZ成分は常に正(付属品定義空間上の上方向)を保って下さい。 これにより、相当にダクト的な機器形状を定義することが可能となります。 |
立体生成の可能/不可能について
-
可能
-
不可
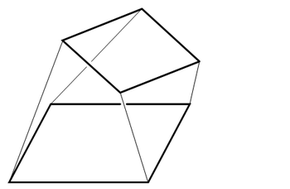
対応する辺が同一平面上にあるので、立体を生成できます。
対応する辺がねじれの位置にある時は、立体を生成できません。
立体を生成できる実例
底面用のシンボルには、視線方向によっては、![]() 印が見えます。
印が見えます。
これは、ダクト用組図表現のためです。
ホイストレールR部の入力方法
概要
ホイストレールのR部は、シンボルNo.=11460(下図)を3枚組み合わせます(H型鋼、I型鋼の場合)。
パラメータの設定
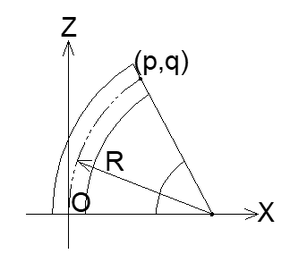
-
P1、P2の求め方(P1>0、P2>0)通常はR、θが与えられていますが、下図においてP=P1、q=P2とおくと、
・p=R・(1-cosθ)
・q=R・sinθ
となります。
-
PP3、P4の求め方(P3>0、P4>0)下図の様な断面のホイストレールの場合
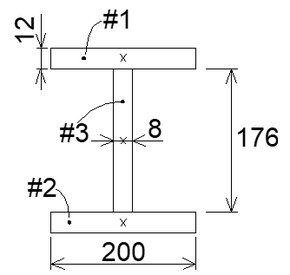
P3 P4 #1 200 12 #2 200 12 #3 8 176 - P5=1000で固定です。